名词解释
世界坐标(worldPosition)
绘图软件的基本坐标系,系统中所有点的坐标都是以该坐标的原点来确定位置的。
构件(Component)
构件是三维模型中的对象,可以理解成建筑的零部件,一栋建筑是由成千上万个构件组成的,每个构件都有自己的ObjectId、位置信息和属性信息。
包围盒(BoundingBox)
包围盒是规则的立方体,是一个物体(一个模型、一个构件、一组构件)在视图中的最大边界。如下图。
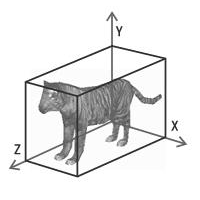
一般来说,BoundingBox的数据结构是两个三维坐标[x, y, z],分别是包围盒左下角的坐标及右上角的坐标。
{
"min": {
"x": 20174.197245435877,
"y": 60867.47840650141,
"z": 2946.249999999989
},
"max": {
"x": 20824.197245435877,
"y": 61517.47840650142,
"z": 3046.249999999989
}
}
相机(camera)
相机是图形学中的一个重要概念,开发人员可以理解成三维模型的视角信息